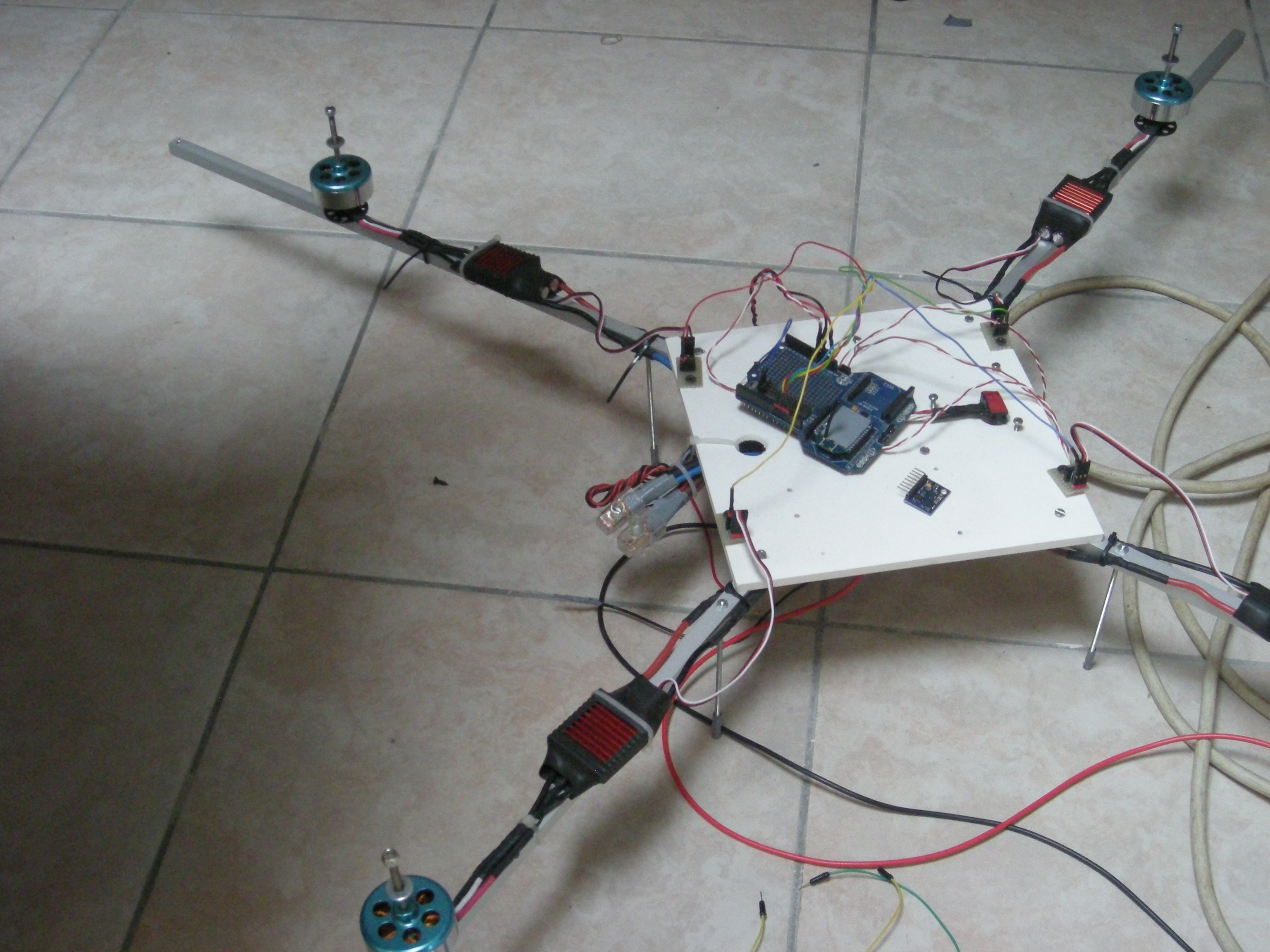
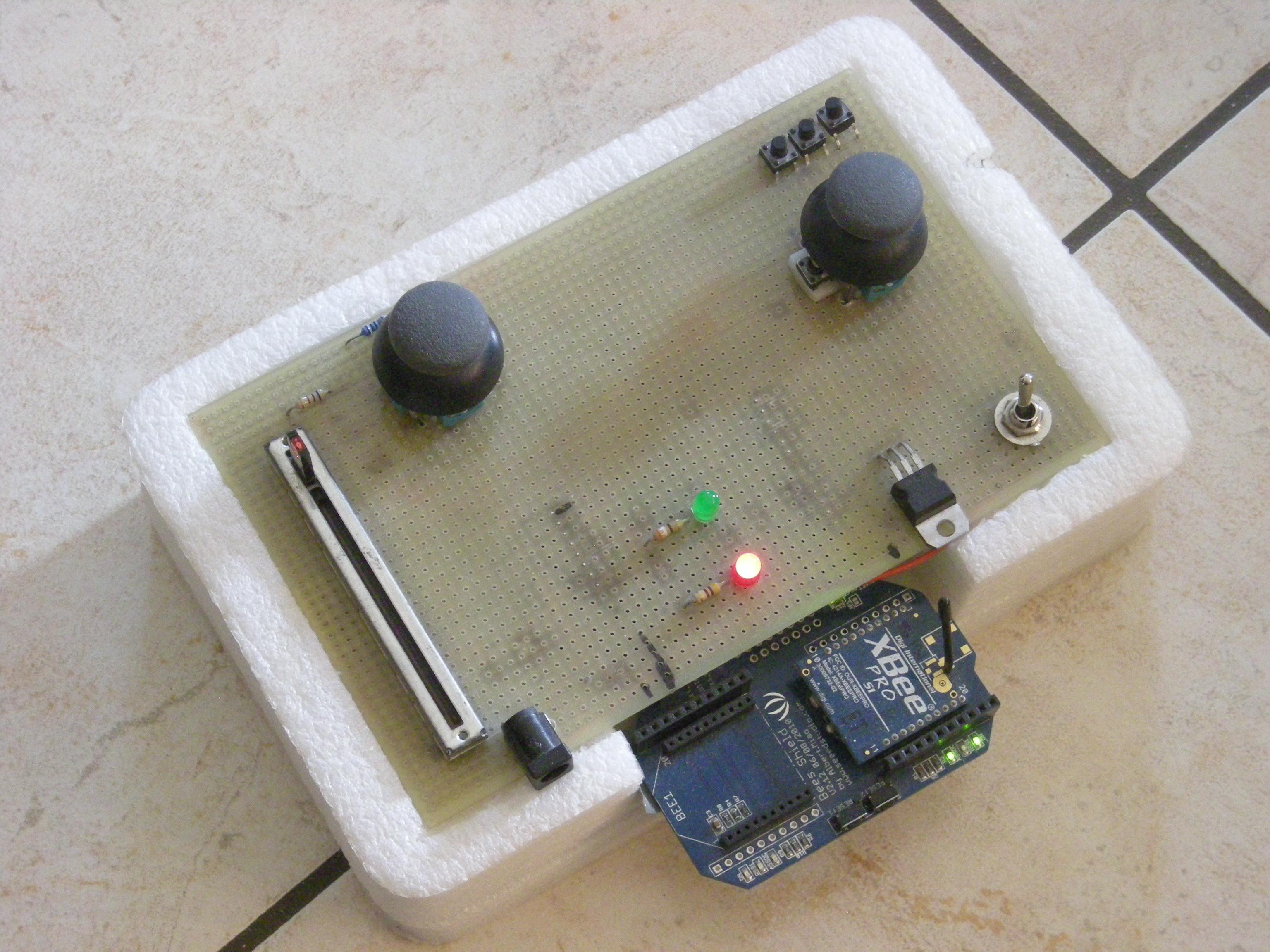
Il quadricottero Quando avevo 11 anni decisi di costruire un quadricottero con Arduino e devo ancora finirlo. Il controller è composto da un arduino e un xbee pro attaccato su una millefori su cui sono fissati due joystick, un potenziometro, dei pulsanti e dei LED. Sul quadricottero uso una batteria ai polimeri di litio a 3celle da 8Ah che, a causa del consumo elevato dei motori, 40A ciascuno alla massima potenza, non ha una grande autonomia, mentre invece impiega tante ore per una ricarica. I motori sono brushless e vengono pilotati da 4 ESC controllati da Arduino.. Il problema principale è stabilizzare il quadricottero perchè il segnale dell’accelerometro è molto disturbato dalle vibrazioni prodotte dai motori. Anche un filtro passa-basso passivo non riesce a filtrare bene il segnale, ora ho risolto sostituendo l’accelerometro e i giroscopi analogici e ingombranti con una IMU digitale 9DOF comprata dalla cina a pochi euro e usando un filtro complementare digitale.